

Weg von der individuell zugeschnittenen Sondermaschine für einen speziellen Prozess – hin zum universell einsetzbaren, mobilen CNC-Roboter: Im Rahmen von Industrie 4.0 hat die Luftfahrtbranche eine Automatisierungsoffensive gestartet. In dem Projekt „Prozesssichere hochproduktive Präzisionszerspanung von CFK-Großstrukturen (ProsihP II)“ entwickelten Experten unterschiedlicher Disziplinen die mobile und hochpräzise Bearbeitung von CFK-Großbauteilen durch parallel arbeitende Roboter.
Die derzeit eingesetzten kostspieligen Portalmaschinen lassen ein schnelles Einmessen und Bearbeiten nicht zu. Insbesondere bei Bauteilen aus carbonfaserverstärkten Kunststoffen (CFK) vermag die Prozessüberwachung Bearbeitungsfehler nicht zu verhindern, was immer wieder zu irreparablen Schädigungen des Materials und zu hohen Ausschusskosten führt.
Entwicklungsziele
Die Projektmitarbeiter von ProsihP II haben sich ihre Entwicklungsziele in den letzten drei Jahren deshalb klar gesteckt:
- Eine Basis für ein modulares System aus fahrbaren Robotern, das sich an fast alle Bauteilgeometrien und Bauteilabmessungen anpasst.
- Die Möglichkeit der Kombination mehrerer Roboter im gleichzeitigen Einsatz für eine sehr viel schnellere Bearbeitung von CFK-Großbauteilen.
- Wandlungsfähigkeit, indem sich mobile robotische Einheiten mit wechselbaren Endeffektoren für eine Vielzahl weiterer Prozesse in der Produktion nutzen lassen.
- Die Entwicklung eines hochpräzisen Roboters, welcher durch seine genaue Bahnführung neue Anwendungsfelder erschließt.
- Eine kontinuierliche Prozessüberwachung, die den Prozess bei steigendem Fehlerrisiko rechtzeitig wieder zurück in ein sicheres Prozessfenster bringt, bevor ein Schaden entsteht.
Mobiles Trägerfahrzeug für den CNC-Roboter
Um ein hoch flexibles Maschinenkonzept und die gewünschten Freiheitsgrade zur Positionierung von Bearbeitungssystemen am Bauteil zu ermöglichen, wurde eine fahrbare Plattform für Industrieroboter entwickelt. Voraussetzung für gute Bearbeitungsergebnisse ist dabei deren hinreichende statische und dynamische Stabilität. Das Automatisierungs-Team des Fraunhofer IFAM hat in Zusammenarbeit mit den Projektpartnern ein mobiles Trägerfahrzeug für austauschbare und herstellerunabhängig wählbare Schwerlastroboter konzipiert und gebaut.
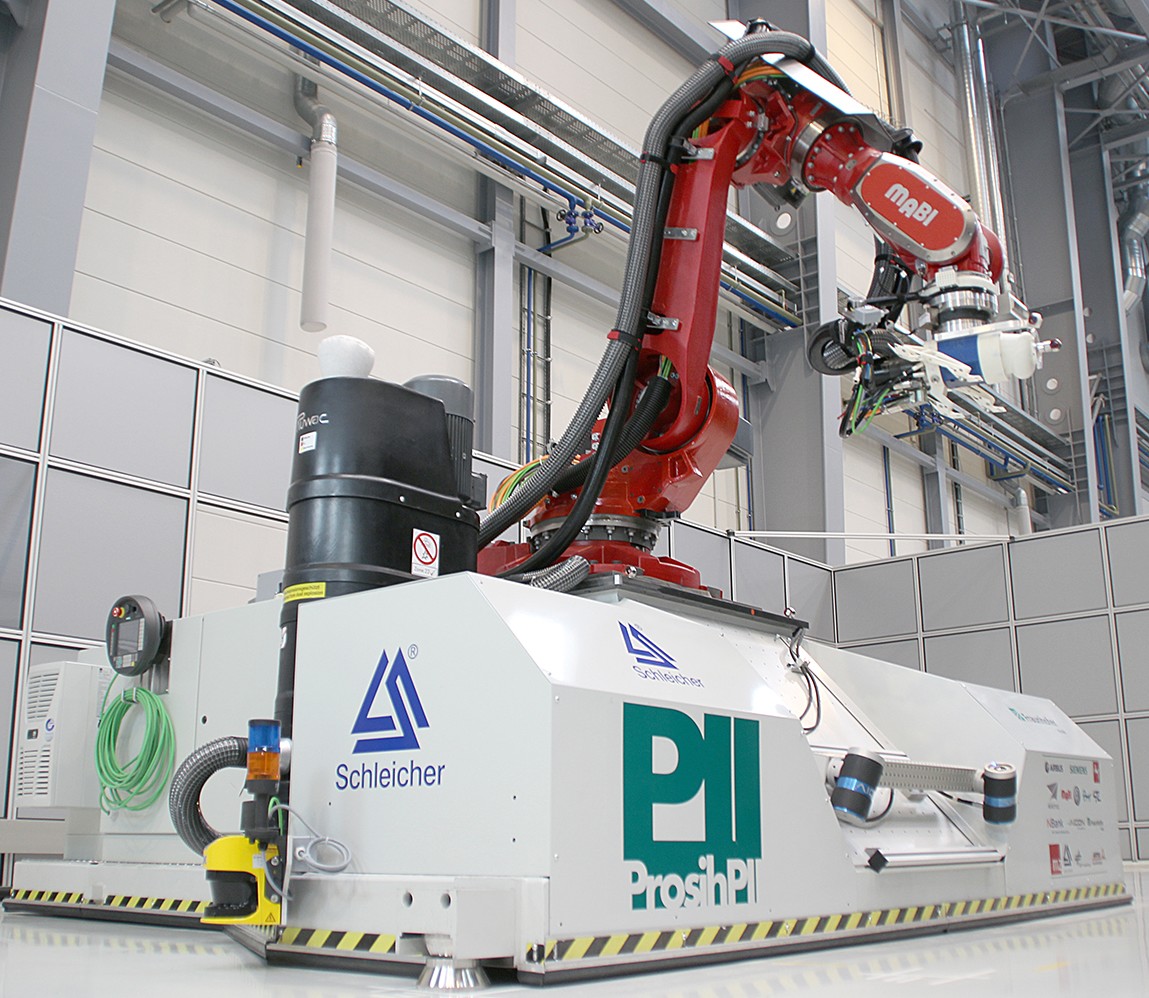
Mobiler CNC-Roboter für die Bearbeitung von CFK-Großstrukturen. Foto: Fraunhofer IFAM
Die kosteneffiziente, aus marktüblichen Komponenten aufgebaute Bewegungsplattform setzt für die Prozessdurchführung mit drei Stützen statisch bestimmt auf dem Boden auf. Destabilisierende Effekte des Fahrwerks können so vermieden werden. Für einen Ortswechsel fährt die Plattform ihre drei Räder über die Stützen hinaus aus. Der gesamte Aufbau hat damit Bewegungsfreiheit bis hin zur Drehung auf der Stelle.
Als zweite Systemkomponente lassen sich Industrieroboter mit bis zu 3 t Gewicht auf die universelle Anschlussplatte der fahrbaren Plattform montieren. Für das Projekt waren die Anforderungen an die absolute Positionier- und Bahngenauigkeit des Gesamtsystems aus Roboter und Bearbeitungsplattform so hoch, dass es notwendig war, die Leistungsfähigkeit des gewählten Roboters entscheidend zu steigern.
Präzisionssteuerung für den CNC-Roboter
Dazu wurde die Roboterkinematik mit einer CNC-Steuerung (Siemens SINUMERIK 840D sl) ausgestattet, kompatible Motoren eingebaut und abtriebsseitige Winkelmesssysteme an jeder Achse zur Korrektur von Positionsabweichungen ergänzt. Zudem ermittelt ein weiterentwickeltes Kamerasystem die aktuelle Pose des Roboters für eine Echtzeitkorrektur durch Abgleich mit den Soll-Daten.
Durch die gemeinsame Entwicklung ist einer der genauesten Bearbeitungsroboter weltweit entstanden. Das Fraunhofer IFAM arbeitete für diesen Fortschritt im Bereich Robotik eng mit PD Dr.-Ing. Jörg Wollnack von der TU Hamburg zusammen.
Sowohl die Vorgehensweise als auch die verwendeten Technologiebausteine haben den Vorteil, dass sie sich auf jede Roboterkinematik anwenden lassen. Damit wurde ein wesentlicher Schritt hin zu einem Standard für absolutgenaue Roboter in der Flugzeugproduktion vollzogen.
Der erste Test – ein Erfolg
Nach der Entwicklungsphase wurde die selbsttätige Anpassung mobiler, robotergestützter Fräsprozesse an differierenden Bauteilgeometrien und -positionen bei einer 7 x 2 m großen CFK-Seitenleitwerksschale des Airbus A320 erfolgreich getestet. Das System ist aber auch für deutlich größere Bauteile mit Längen von bis zu 30 m ausgelegt. Damit ist es für unterschiedliche Flugzeug-Primärstrukturen wie Flügelschalen oder Rumpfsegmente anwendbar. Darüber hinaus kann der mobile Bearbeitungsroboter mit geringen Modifikationen für Rotorblätter von Windkraftanlagen, Strukturen von Schienenfahrzeugen oder Großbauteile im Schiffsbau bearbeiten.
Mitwirkende: Aicon 3D Systems GmbH, Airbus Operations GmbH, Artis GmbH, CTC GmbH Stade, IPMT der TU Hamburg, Ludwig Schleicher Anlagenbau GmbH, Mabi AG, mz robolab GmbH, Siemens AG und Volkswagen AG
Förderung: Das Projekt ProsihPII (ZW 3-80140004) wird gefördert vom Niedersächsischen Ministerium für Wirtschaft, Arbeit und Verkehr sowie dem Projektträger Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR).
Weitere Informationen: www.ifam.fraunhofer.de