

[FernUniversität in Hagen] – Das Team von Wolfram Schiffmann, Professor für Rechnerarchitektur an der FernUniversität in Hagen, wurde für den an seinem Lehrgebiet entwickelten Notlande-Assistenten „Engine-out Emergency Landing Assistant“ ELA mit dem „Innovation Award“ ausgezeichnet: Wenn es zum Komplettausfall des Flugzeugantriebs kommt, kann das Notlandeassistenzsystem Pilotinnen und Piloten wirkungsvoll unterstützen. Es ermittelt einen im Gleitflug erreichbaren Landeplatz und hilft bei der Steuerung der antriebslosen Maschine dorthin bis zum Boden. Um eine Aircraft-Control-Komponente zu „Safe2Land“ erweitert, können Maschinen auch bei einem Ausfall der Crew automatisch landen.
„Ob durch ein technisches Problem, Vogelschlag oder Benzinmangel: Flugzeugmotoren können immer ausfallen!“ sagt Prof. Dr. Wolfram Schiffmann mit großem Nachdruck. Der Informatik-Professor an der FernUniversität ist in seiner Freizeit mit Leib und Seele Pilot und Fluglehrer. Wenn es zum Komplettausfall des Flugzeugantriebs kommt, kann das an seinem Lehrgebiet Rechnerarchitektur entwickelte Notlandeassistenzsystem Pilotinnen und Piloten wirkungsvoll unterstützen. Es ermittelt einen im Gleitflug erreichbaren Landeplatz und hilft bei der Steuerung der antriebslosen Maschine dorthin bis zum Boden. Der „Emergency Landing Assistant“ (ELA) und die „Emergency Landing Field Identification“ (ELFI) wurden jetzt um eine Aircraft-Control-Komponente zu „Safe2Land“ erweitert und können nun eine Maschine auch bei einem Ausfall der Crew automatisch landen.
Vielfältige Anwendungen für „Safe2Land“
Die Forschenden der FernUniversität entwickelten neue Methoden, um anhand von Geodaten automatisch Notlandefelder zu identifizieren und Gleitpfade dorthin sehr effizient zu berechnen. So entstand beispielsweise für Nordrhein-Westfalen mithilfe künstlicher neuronaler Netze eine Datenbank mit mehr als 100.000 Notlandefeldern. Mit einem neuen Ansatz zur Berücksichtigung der Windsituation konnte die Gleitpfad-Berechnung um sechs Zehnerpotenzen beschleunigt werden, so dass selbst auf einem handelsüblichen Tablet-PC pro Gleitpfad nur etwa eine Millionstel-Sekunde benötigt wird. So können während des Fluges permanent alle möglichen Gleitpfade bestimmt und der beste ausgewählt werden.
„Safe2Land“ wurde sowohl in einem vom Lehrgebiet selbst entwickelten Forschungsflugsimulator als auch in realen Flugzeugen erfolgreich getestet. Für künftige Flugzeuge mit Single Pilot Operation (SPO) oder auch Airtaxis sowie unbemannte Flächendrohen gibt es vielfältige Anwendungen.
Antriebslos zur Landebahn gleiten
Gefährdet von einem Triebwerksausfall sind nicht nur einmotorige Maschinen, sondern sogar Passagierflugzeuge (bei denen der Trend weg von den viermotorigen hin zu sparsameren zweimotorigen Typen geht). Der Pilot muss in einem solchen Fall seine antriebslose Maschine wie ein Segelflugzeug zu einer passenden Landebahn gleiten lassen und dort kontrolliert aufsetzen. Durch eine solche waghalsige, aber alternativlose Aktion wurde 2009 Chesley „Sully“ Sullenberger berühmt, als er seinen Airbus mit stehenden Rotoren auf den Hudson River in New York lenkte.
Für Piloten sind solche Situationen purer Stress. Sie müssen innerhalb kürzester Zeit mit oft unzureichenden Informationen genau die richtigen Entscheidungen treffen und umsetzen. Viele Rahmenbedingungen und Einflussgrößen können jedoch oft nur geschätzt werden.
Schon die Entscheidung für einen von mehreren möglichen Landeplätzen ist äußerst schwierig. Prof. Dr. Wolfram Schiffmann: „Sie ist oft endgültig, es gibt nur einen Versuch!“ Zudem sind Motorflugzeuge nicht als Segelflieger konstruiert, ihre Gleitflugeigenschaften unterscheiden sich im Kurven- und im Geradeausflug erheblich. Insbesondere bei langsam fliegenden Flugzeugen ist auch die momentane – sich ändernde – Windsituation zu berücksichtigen.
Optimalen Gleitpfad zum Landeareal finden
Unterstützt werden kann die Crew durch die schnelle Bahnplanung mittels ELA. Der Notlandeassistent berechnet für jede Landebahn in der näheren Umgebung vier Gleitpfade und hilft den Piloten, den optimalen Gleitpfad zum Landeareal zu finden. Ist kein geeigneter Flugplatz erreichbar, kann auch auf eine Datenbank mit Notlandeplätzen zurückgegriffen werden, die mittels ELFI identifiziert wurden. Eine Landebahn sollte möglichst entgegen der Windrichtung ausgerichtet sein. Außerdem muss sie sowohl in Landerichtung wie auch quer dazu groß genug für das antriebslose Flugzeug sein. Zu beachten ist auch, dass die Bahn keine Neigung in Längs- und Querrichtung hat, die für das Flugzeug ungeeignet ist.
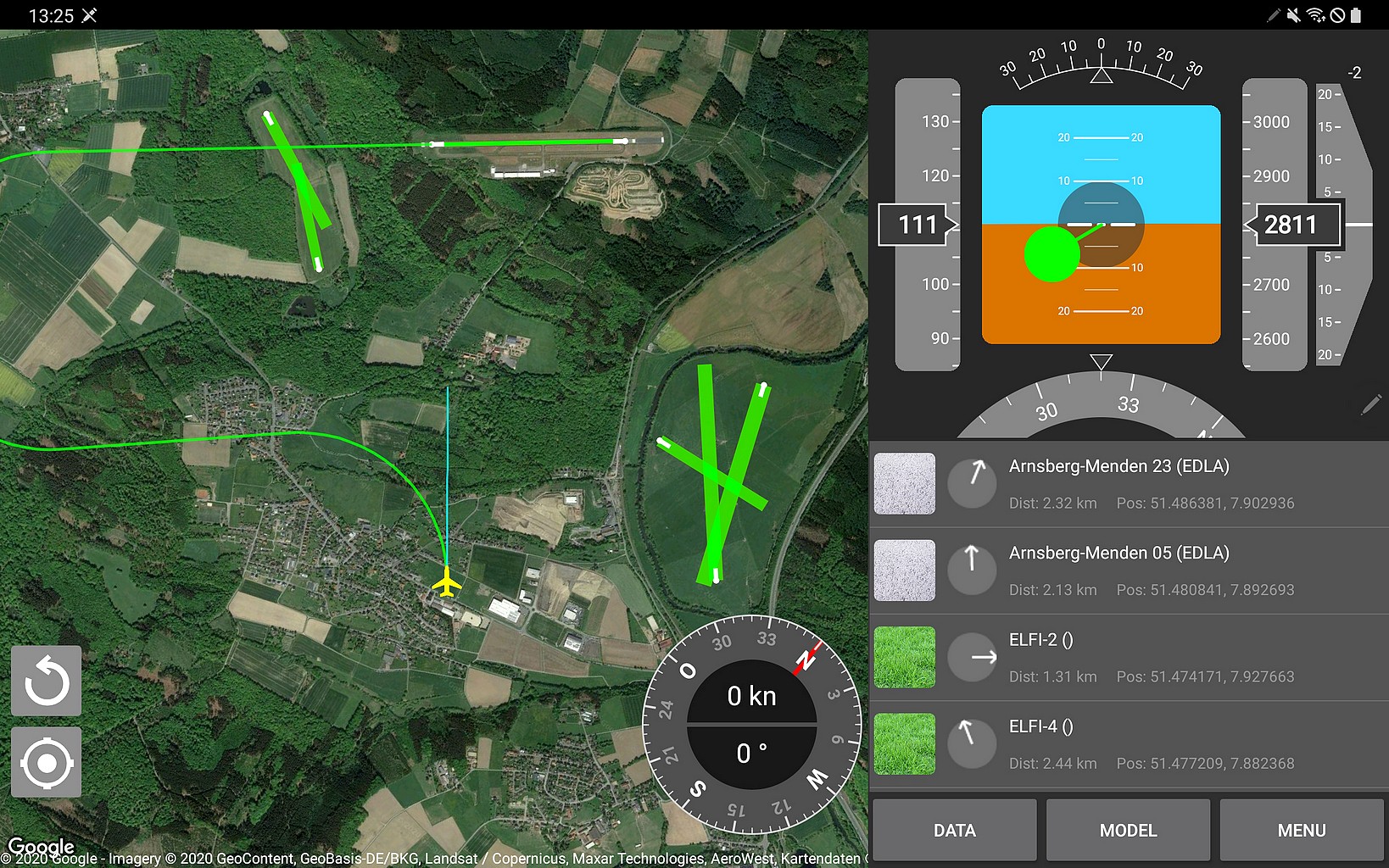
Auf einem Tablet-PC ist Safe2Land schon jetzt verfügbar. ©_FernUniversität
Den Gleitpfad hinunter zum Notlandeplatz müssen die Piloten genau einhalten, damit das Flugzeug in der richtigen Position und mit der optimalen Geschwindigkeit am Beginn der Landegeraden aufsetzen kann. Jedoch können Winde Richtung und Geschwindigkeit des Flugzeugs schwer abschätzbar beeinflussen, durch Böen kann das Flugzeug sogar „schräg im Wind stehen“. ELA ist jedoch in der Lage, den Gleitpfad permanent neu zu berechnen: „Unser Verfahren modelliert beliebige Windkonfigurationen und berechnet selbst bei komplexen Windszenarien in Echtzeit den optimierten Gleitpfad“, erläutert Schiffmann. „Bisherige Verfahren auf der Grundlage zykloider Kurven, sogenannter Trochoiden, können dagegen nur eine konstante Windkomponente berücksichtigen.“
Die Geodaten der Landebahnen erhält ELA von einer Datenbank, die von ELFI erstellt wurde. Dieser Notlandeplatzfinder nutzt hochgenaue Höhendaten, die mit der LIDAR-Technologie gemessen wurden. LIDAR steht für „Light Detection and Ranging“, eine bewährte Messtechnologie, die mit Laserstrahlen – ähnlich einem Radar – arbeitet. ELFI wertet das dreidimensionale Oberflächenmodell (Digital Surface Modell) aus und bestimmt dabei Notlandeflächen, die für die Landung des antriebslosen Flugzeuges geeignet sind. Zusätzlich werden die Notlandefelder mit Satellitenbildern mittels künstlicher neuronaler Netzwerke und digitalen Straßenkarten überprüft, damit z.B. Gräben auf Feldern oder Gewässer nicht als Landemöglichkeit eingestuft werden.
Hochkomplexe Berechnungen
„Für unsere hochkomplexen Berechnungen haben wir Computersysteme mit parallel arbeitenden Mehrkernprozessoren eingesetzt, die ihre Teilergebnisse später zusammengeführt haben“, erläutert Wolfram Schiffmann. „Obwohl wir nur die Höhendaten für eine begrenzte Anzahl von Landerichtungen abgetastet und jeweils geprüft haben, ob die Landeplätze bzgl. Größe und Neigungen geeignet sind, fielen gewaltige Datenmengen an. Bei der Ermittlung von Notlandefeldern allein im Raum Hagen etwa mussten ettliche Gigabytes ausgewertet werden.“
„Safe2Land“ mit Autopilot erprobt
In seiner Masterarbeit hat ein FernUni-Student am Lehrgebiet Rechnerarchitektur „Safe2Land“ in ein unbemanntes Modellflugzeug mit 1,4 Metern Spannweite und 1,5 Kilogramm Abflugmasse integriert. Wesentlicher Bestandteil seiner Arbeit ist ein von ihm entwickelter Regler, der das Fluggerät entlang der von „Safe2Land“ geplanten Notlandebahn führt.
Die abschließende Analyse von Flugdaten aus Simulationen und einem realen Flugversuch stellte die hohe Genauigkeit des automatisierten Gleitfluges unter Beweis. Selbst bei simulierten Turbulenzen wich die Position im Endanflug weniger als 25 Zentimeter in der Horizontalen und weniger als fünf Zentimeter in der Vertikalen von den vorausberechneten Werten ab. Und auch bei einem realen Testflug landete das von Safe2Land gesteuerte Flugmodell unbeschadet auf einer Wiese.
