
[Jade HS] – Wasserbauten wie zum Beispiel Hafen- und Offshore-Anlagen stellen komplexe Anforderungen an Wartung und Überwachung, die häufig mit ferngesteuerten oder autonomen Unterwasserfahrzeugen gelöst werden. Wissenschaftler der Jade Hochschule erweiterten in dem Forschungsprojekt „Entwicklung innovativer Technologien für autonome maritime Systeme“ (EITAMS) das Einsatzspektrum solcher Systeme. Sie entwickelten einen Versuchsträger aus einem autonom operierenden Überwasserfahrzeug (USV), der einen Schwarm selbständig fahrender und kooperierender Unterwasserfahrzeuge (AUVs) steuert. Auf diesem werden eigene intelligente Algorithmen zur Missionssteuerung sowie neuartige Messtechniken erprobt.
Wasserbauten wie zum Beispiel Hafen- und Offshore-Anlagen stellen komplexe Anforderungen an Wartung und Überwachung, die häufig mit ferngesteuerten oder autonomen Unterwasserfahrzeugen gelöst werden. Wissenschaftler der Jade Hochschule erweiterten in dem Forschungsprojekt „Entwicklung innovativer Technologien für autonome maritime Systeme“ (EITAMS) das Einsatzspektrum solcher Systeme. Sie entwickelten einen Versuchsträger aus einem autonom operierenden Überwasserfahrzeug (USV), der einen Schwarm selbständig fahrender und kooperierender Unterwasserfahrzeuge (AUVs) steuert. Auf diesem werden eigene intelligente Algorithmen zur Missionssteuerung sowie neuartige Messtechniken erprobt.

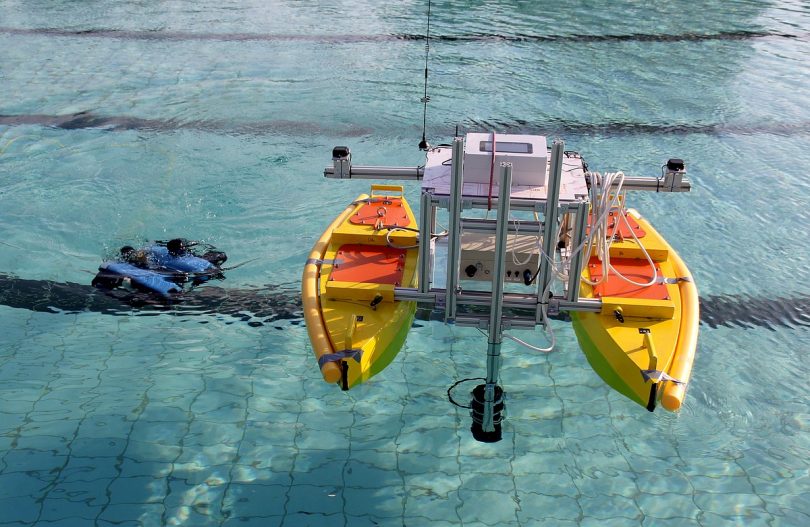
Die Unterwasserfahrzeuge sind mit einem photogrammetrischen Kamerasystem zur dreidimensionalen Erfassung von Objekten unter Wasser ausgestattet. Foto: Jade HS
Unter der Leitung von Prof Dr. Klaus-Jürgen Windeck haben drei Fachbereiche der Jade Hochschule mit unterschiedlichen Spezialgebieten fünf Teilbereiche des Groß-Projektes bearbeitet:
- Um in unbekannten oder schwer zugänglichen Gebieten operieren zu können, wurde unter der Leitung von Prof. Dr. Frank Wallhoff eine intelligente Steuersoftware für Über- und Unterwasserfahrzeuge entwickelt. Sie ermöglicht, dass die Systeme flexibel unterschiedliche Aufgabenstellungen lösen. Die Fahrzeuge können auf unerwartete Situationen so reagieren, dass sie handlungsfähig bleiben.
- Für die Ausführung von räumlich ausgedehnten Messungen wurden unter der Leitung von Prof. Dr. Lars Nolle intelligente Suchstrategien für die kooperierenden Unterwasserfahrzeuge entwickelt. Diese Verfahren können beispielsweise nach einem Schiffsunglück genutzt werden, um beschädigte Container mit schädlichen Substanzen zu orten und zu inspizieren. Nach einem Schiffsunglück müssen oft sehr große Seegebiete in kurzer Zeit abgesucht werden. Die Unterwasserfahrzeuge können mit intelligenten Konzepten den Suchaufwand auf ein praktikables Maß reduzieren.
- Unter der Leitung von Prof. Dr. Thomas Luhmann wurde ein photogrammetrisches Kamerasystem zur dreidimensionalen Erfassung von Objekten unter Wasser geschaffen. Das Anwendungsspektrum des Systems reicht von der technischen Qualitätskontrolle von Offshore-Bauwerken, der Erfassung archäologischer Fundstellen oder Altlasten (Munition, Sondermüll), der Wrackvermessung bis zu geologischen Fragestellungen und biologischen Phänomenen (zum Beispiel Formerfassung von Korallen).
- Bei den Unterwasser-Missionen können umfangreiche Beobachtungsdaten entstehen. Da die Fahrzeuge nicht immer online sind und häufig nur kleine Datenmengen austauschen können, wurde unter der Leitung von Prof. Dr. Thomas Brinkhoff eine verteilte Speicher- und Anfragearchitektur entwickelt. Ziel war es, ein Datenmanagementsystem zu entwickeln, das die lokale Speicherung und Abfrage von dreidimensionalen Daten erlaubt und den Datenabgleich mit einer zentralen Instanz ermöglicht.
- Unter der Leitung von Prof. Dr. Christian Denker wurde ein Überwasserfahrzeug realisiert. Es dient als Ortungsreferenz und Kommunikationsknoten für die Unterwasserfahrzeuge und hält Funkverbindung mit der Operationszentrale. Zudem transportiert es die zusätzliche Technik für die Unterwasserfahrzeuge.
Das Forschungsprojekt EITAMS wurde von der Niedersächsischen Volkswagen Stiftung in den letzten vier Jahren mit insgesamt 1,5 Millionen Euro gefördert.