

[TU Berlin] – Wissenschaftler testen im Projekt autoNV einen automatisiert fahrenden Kleinbus für den Einsatz im öffentlichen Nahverkehr in ländlichen Regionen
Die acht Kilometer lange Teststrecke durch die 6.000-Einwohner-Stadt Wusterhausen/Dosse im Landkreis Ostprignitz-Ruppin ist kurvig und voller „Hindernisse“. Mal muss nach rechts, mal nach links abgebogen werden. Kreuzungen sind zu überfahren, Vorfahrten zu gewähren. Es geht über Kopfsteinpflaster, vorbei an parkenden Autos. Zebrastreifen sind zu beachten und Ampelanlagen. Für Autofahrer aus Fleisch und Blut natürlich kein Problem. Für EZ10 jedoch ist die Strecke eine Herausforderung. Denn EZ10 hat kein Lenkrad, und ein Platz für den Fahrer ist erst gar nicht vorgesehen: EZ10 ist ein automatisiert fahrender elektrischer Kleinbus. „Wir wollen mit ihm testen, inwiefern autonom fahrende Fahrzeuge im öffentlichen Nahverkehr in ländlichen Regionen eingesetzt werden können“, sagt Arne Holst, wissenschaftlicher Mitarbeiter in dem Projekt „Autonomer öffentlicher Nahverkehr im ländlichen Raum – Wirkungsforschung zu neuen Formen innovativer Mobilität und Nutzerakzeptanz“ (autoNV).
Ersatz für fehlende ausgebildete Busfahrer+innen
Die Wissenschaftler+innen um Arne Holst und Alexander Egoldt haben sich für den brandenburgischen Landkreis Ostprignitz-Ruppin entschieden, weil er vom demografischen Wandel betroffen ist. Durch Abwanderung, (Über)alterung, aber auch durch den dominanten individuellen Autoverkehr sind die Fahrgastzahlen im öffentlichen Nahverkehr (ÖPNV) in dieser Region stetig gesunken. Abwanderung und Alterung lassen außerdem die Schülerzahlen wegbrechen, die aber das Rückgrat des ÖPNV in ländlichen Regionen sind.
Um überhaupt noch wirtschaftlich arbeiten zu können, sind die Verkehrsbetriebe gezwungen, immer mehr Linien zu streichen. Das macht den ÖPNV dann aber noch unattraktiver und schränkt besonders ältere Menschen ohne PKW in ihren Mobilitätswünschen extrem ein. Für sie ist dann im wahrsten Sinne des Wortes kein Fortkommen mehr. „Es ist eine Abwärtsspirale, wobei ein negativer Faktor den anderen verstärkt. Durch Abwanderung und Alterung fehlt es eben auch an geschulten Busfahrerinnen und -fahrern“, sagt Arne Holst. Ziel des Projektes ist es deshalb, den ÖPNV im ländlichen Raum weiterhin zu ermöglichen, damit Landkreise wie Ostprignitz-Ruppin nicht abgeschrieben werden.
Warum sich Arne Holst und Alexander Egoldt dazu entschieden haben, die Zukunftsfähigkeit des Nahverkehrs auf dem Lande mit automatisiert fahrenden Bussen zu erforschen, hat seine Ursache in den fehlenden ausgebildeten Busfahrern. „Wirklich autonom fahrende Busse werden keine mehr brauchen, auch wenn das im Moment noch Zukunftsmusik ist, da es wirklich autonom fahrende Busse, die die gesamte Komplexität des Straßengeschehens beherrschen, noch nicht gibt. In unserem Testbus fährt immer ein Operator mit, der in schwierigen Situationen eingreift“, erklärt Holst.
Der Bus fährt von montags bis freitags von 9:00 bis 17:30 Uhr und am Samstag von 9:00 bis 13:30 Uhr mit einer Geschwindigkeit von 15 km/h. Er verfügt über sechs Sitzplätze, auch über eine Rampe für Rollstuhlfahrer, die aber noch nicht zugelassen wurde. ©_AutoNV_OPR
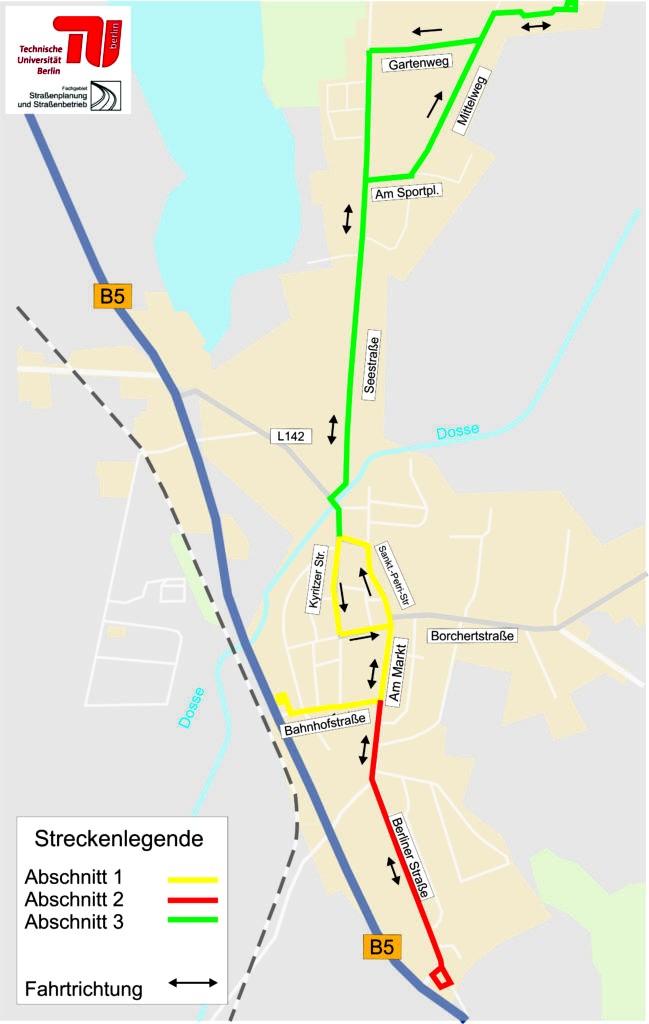
Die autoNV-Teststrecke verbindet das historische Ortszentrum von Wusterhausen/Dosse, den Bahnhof, einen im Süden der Stadt gelegenen Supermarkt und die nördliche Stadtrandsiedlung „Am Horstberg“. Diese Streckenführung ergab sich aus einer Nutzerbefragung, den derzeit technischen Möglichkeiten des Kleinbusses und rechtlichen Bedingungen. „Wir wollten die Strecke so realitätsnah wie möglich gestalten, so dass sie so weit wie möglich das gängige komplexe Verkehrsgeschehen abbildet. Diese Komplexität der Strecke war uns wichtig, um später Übertragbarkeitsaussagen treffen zu können“, sagt Holst.
Der Minibus fährt entlang eines einprogrammierten Streckenverlaufs. Die Orientierung erfolgt per GPS, per Korrektursignal über das Mobilfunknetz und per Laser-Sensoren. Mit diesen drei Ortungsmöglichkeiten wird die zuvor eingespeicherte Geometrie des Streckenverlaufs mit markanten Orientierungspunkten (zum Beispiel Gebäude) „wiedererkannt“. Demnach gehören zu den „infrastrukturellen Voraussetzungen eine stabile GPS- und Mobilfunknetzabdeckung, Orientierungspunkte und eine Lade- und Unterstellmöglichkeit“, sagt Holst.
Der Kleinbus kommt gut an
Obwohl der autoNV-Testbus im Rahmen seiner jetzigen technischen Möglichkeiten relativ fehlerlos fährt‚ zeigt sich, dass er von den intuitiven Fähigkeiten eines Menschen noch weit entfernt ist. „Momentan braucht es noch ein einfaches Verkehrsgeschehen. Auf der Straße parkende Fahrzeuge erkennt er zwar als Hindernis, kann sie aber aktuell noch nicht umfahren, da er durch die einprogrammierte Strecke wie auf einer Schiene fährt. Ein Ausweichen nach rechts oder links bewältigt er nicht. Da muss der Operator eingreifen. Auch auf die Fahrbahn ragende Äste oder Grashalme detektiert er als Hindernis und stoppt. Vorfahrtsregeln ‚beherrscht‘ der EZ10 noch nicht. Das muss der Operator regeln. Auch Ampeln sind ein Problem. Bei Grün gibt ebenfalls der Operator das Ok“, resümiert Arne Holst, sodass beim jetzigen Stand der Technik noch kein Personal eingespart werden kann.
Trotz all dieser Schwächen kommt der Kleinbus bei den Menschen gut an. Zwar wurde auf einer Skala von 0 bis 5 die die Geschwindigkeit – mit 15 km/h war er vielen zu langsam – nur mit 3,52 Punkten bewertet, also mit „weniger zufrieden“. Die Sicherheit des Fahrgastes im Bus, die Sicherheit des Busses im Straßenverkehr und die Zuverlässigkeit bekamen jedoch vier und mehr Punkte. Der Aussage „Insgesamt vertraue ich dem fahrerlosen Bus“ stimmten 42 Prozent der Befragten „völlig“ und 44 Prozent „eher“ zu. 46 Prozent der Befragten beurteilten die Auswirkungen eines solchen automatisiert fahrenden elektrischen Busses auf den ÖPNV „eher positiv“ und 16 Prozent „sehr positiv“.
Das Projekt autoNV ist am Fachgebiet Straßenplanung und Straßenbetrieb von Prof. Dr.-Ing. Thomas Richter angesiedelt und wird von Bundesministerium für Verkehr und digitale Infrastruktur mit zwei Millionen Euro gefördert. Außerdem war es für den Deutschen Nachhaltigkeitspreis 2019 nominiert.
Ähnliche Projekte mit autonomem Shuttle