

[TU Dresden] – It is hard to imagine everyday life without drones. They are used to capture films and images from the air and to carry out inspection or monitoring tasks. Initial pilot projects are even testing the use of drones to deliver packages. The specialization of drones as flying robots also opens up completely new areas for their implementation. By Jacqueline Duwe | TU Dresden.
In one of the videos as part of the “Kurze Frage” (Quickie Question) series, Michael Beitelschmidt, Chair for Dynamics and Mechanism Design, was asked about the potential of flying robots and the state of developments at TU Dresden (TUD).
At the moment, in order to perform work at high altitude, scaffolding needs to be erected, work platforms installed or industrial climbers deployed. The technical precautions necessary to minimize the risk for humans are very cumbersome. Researchers at TU Dresden have developed a flying robot that will be able to take on such high-risk tasks in the future. Possible fields of applications include repairing the rotor blades of wind turbines, cleaning of glass facades and repair work on building facades.
Flying robot. Micha Schuster | TUD
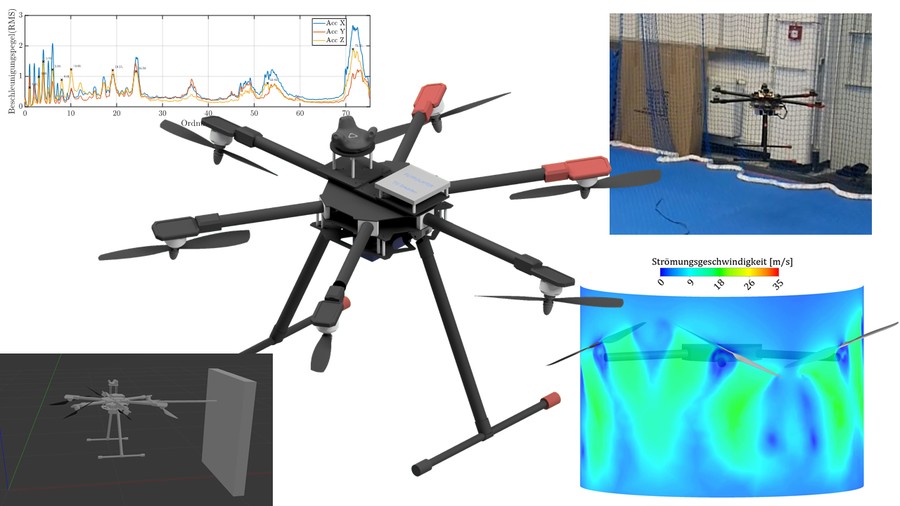
Unlike conventional drones, TUD’s model is a fully-actuated aerial robot. Owing to its six rotors, which work independently and are tilted in different directions, the machine can move and exert force in all directions. It is therefore able to perform a number of delicate tasks, such as tightening screws.
“Our flying robot must be able to handle hands-on situations. It performs configuration tasks where it has to interact with fixed objects in the environment. This entails completely new challenges in terms of control technology required for the flying robot. While a classic drone is capable of holding positions or following specific flight paths, our flying robot must also exert forces or perform movements in specific directions and come into contact with objects,” explains Prof. Beitelschmidt.
The robot is programmed based on a simulation model that replicates the real, physical flight behavior via a computer model. The researchers develop suitable control strategies for different situations and for the necessary work steps. They then transfer these to the flying robot. The scientists in Dresden aim to develop and entire toolbox of skills that will enable flying robots to autonomously perform a wide variety of delicate tasks.
Contact for scientific information: Prof. Michael Beitelschmidt, Chair of Dynamics and Mechanism Design, Email: michael.beitelschmidt@tu-dresden.de