

Die regelmäßige Wartung ist für die Sicherheit maritimer Anlagen essenziell. Zukünftig sollen Roboter diese für den Menschen aufwendige und gefährliche Aufgabe übernehmen. Im Verbundprojekt Mare-IT, das vom BMBF mit ca. 5,5 Mio. Euro gefördert wird, entwickelt ein Konsortium namhafter Unternehmen und Forschungseinrichtungen unter Leitung des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) ein zweiarmiges Autonomes Unterwasserfahrzeug (AUV), das sowohl autonom als auch ferngesteuert unter Wasser operieren kann. Zugleich stellt es die notwendige IT-Infrastruktur bereit, um einen reibungslosen und bidirektionalen Informationsfluss mit dem Anlagenbetreiber zu gewährleisten.
Der Einsatz von Robotern und IT-Systemen ist ein wesentlicher Faktor für die zukünftige Nutzung maritimer Potentiale. Insbesondere die Offshore-Industrie setzt bei der Wartung ihrer Infrastruktur, z.B. von Windenergieanlagen oder Öl- und Gasförderungsanlagen, vermehrt auf Roboter, um Schäden an Anlagen, kostenintensive Ausfälle, aber auch Umweltschäden zu vermeiden. Dabei geht der Trend weg von rein ferngesteuerten Systemen, hin zu Unterwasserfahrzeugen, die über lange Zeiträume unter Wasser verbleiben, dort autonom operieren und zugleich im Bedarfsfall ferngesteuert werden können. Für einen dauerhaften und reibungslosen Einsatz von Robotern in tiefen Gewässern braucht es allerdings ganzheitliche Lösungen, die neben einem robusten AUV, intuitiven Teleoperationstechnologien, auch die notwendige IT-Infrastruktur bereitstellen, um einen effektiven Informationsfluss mit den Anlagenbetreibern zu ermöglichen.
Hier setzt das vom DFKI Robotics Innovation Center geleitete Verbundprojekt Mare-IT an, das führende Unternehmen und Forschungseinrichtungen aus den Branchen IT, Robotik, Antriebstechnik und Offshore vereint. Zum Projektkonsortium [=>] gehören zudem die DFKI-Forschungsbereiche Kognitive Assistenzsysteme (vormals Intelligente Benutzerschnittstellen) und Eingebettete Intelligenz sowie die WITTENSTEIN cyber motor GmbH, SAP SE, die IMPaC Offshore Engineering GmbH und die ROSEN Technology and Research Center GmbH.

Die in Mare-IT entwickelten Technologien können in der europaweit einmaligen Maritimen Explorationshalle des DFKI in Bremen getestet werden. ©_DFKI GmbH, Foto Annemarie Popp
Prof. Dr. Dr. h.c. Frank Kirchner, Leiter des DFKI Robotics Innovation Centers: „Das Projekt Mare-IT soll die maritime Robotik auf eine neue Stufe heben: Mit der gebündelten Kompetenz der Projektpartner wollen wir eine ganzheitliche Lösung für den Einsatz einer neuen Generation autonomer Unterwasserfahrzeuge bieten, die dank einer leistungsstarken IT-Infrastruktur die intuitive Steuerung und Überwachung komplexer Inspektions- und Wartungsaufgaben ermöglicht.“
Im Zentrum von Mare-IT steht die Entwicklung einer IT-Infrastruktur, die den bidirektionalen Informationsfluss und die Einbindung in bestehende Geschäftsprozesse ermöglicht. Um eine ganzheitliche Lösung zu erreichen, liegt der Fokus des Projekts insbesondere auf der Kompatibilität der Einzelkomponenten, der intuitiven Bedienbarkeit sowie der visuell ansprechenden Darstellung aller in den Informationsfluss eingespeisten Daten, z.B. auf einem Tablet oder Smartphone. Darüber hinaus kommen in Mare-IT auch Techniken aus dem Bereich Industrie 4.0 und dem Internet der Dinge zur Anwendung, etwa die vorausschauende Wartung (Predictive Maintenance), die zusätzliche Informationen über den Zustand von Unterwasserstrukturen und Anlagen liefern können.
Ein weiterer Schwerpunkt des Projekts liegt im Bau und der Konzeption eines neuartigen zweiarmigen AUVs, das in die IT-Infrastruktur eingebettet und als mobile Plattform zur Inspektion und Wartung von Unterwasserstrukturen einsetzbar ist. Im projektierten Anwendungsszenario führt das Fahrzeug mithilfe seiner zwei Arme eine Manipulation an einer Infrastruktur (teil-)autonom aus. Dafür dockt es mit einem Arm an die Infrastruktur an, um eine Datenverbindung über eine Hochgeschwindigkeitsschnittstelle herzustellen. Auf diese Weise wird die Informationsübermittlung und damit auch eine Fernsteuerung des AUVs sowie des zweiten Arms durch einen menschlichen Operator möglich. Die Teleoperation erfolgt dabei mittels Exoskelett über einen virtuellen Leitstand, der zusätzliche Kontrolleinrichtungen sowie einen virtuellen Co-Piloten zur Entlastung des Operators bereitstellt. Auf der Konzeption und Entwicklung der notwendigen Leitstandtechnik zur intuitiven Steuerung des robotischen Systems liegt ein weiterer Fokus.
Das Projektkonsortium von Mare-IT
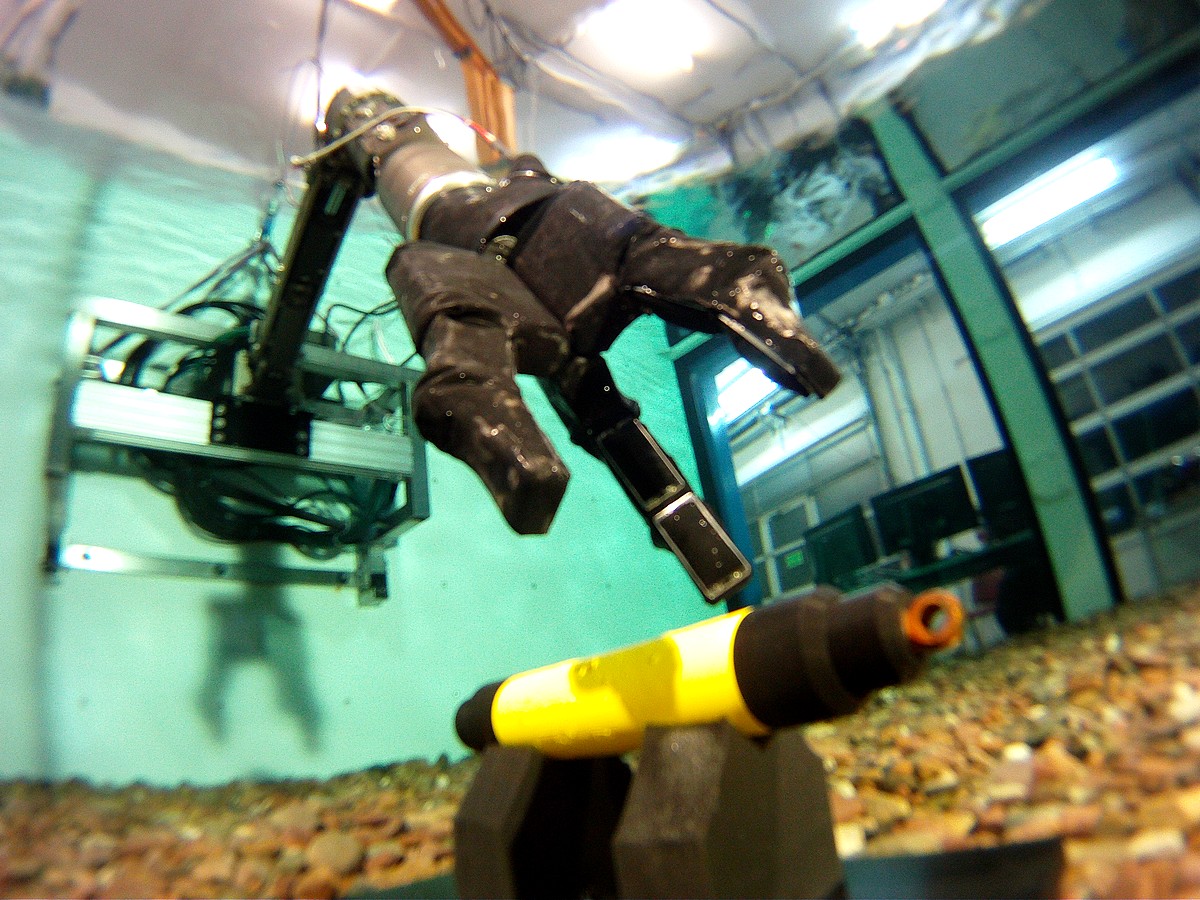
Der am DFKI Robotics Innovation Center entwickelte druckneutral arbeitende taktile Greifer „SeeGrip“ für den Tiefsee-Einsatz. ©_DFKI GmbH
DFKI Robotics Innovation Center:
Innovatives Zweiarm-AUV für den autonomen Betrieb und die intuitive Teleoperation via Exoskelett
Das DFKI Robotics Innovation Center bringt in das Projekt seine langjährige Expertise im Bau autonomer und teleoperierter Unterwasserfahrzeuge sowie auf den Gebieten der Teleoperation und der Mensch-Roboter-Kollaboration ein. Für den autonomen Betrieb des geplanten AUVs setzen die Wissenschaftler auf eine Vielzahl unterschiedlicher Sensoren, z.B. Sonarsensoren, Kameras, Laser und Magnetometer. Um die große Menge an Sensordaten effektiv verarbeiten zu können, erarbeiten die Forscher ein standardisiertes Architekturkonzept, dass die dezentrale Analyse von Datenströmen direkt an Bord des Roboters ermöglicht. Eine große Herausforderung für die Regelung des freischwebenden Fahrzeugs stellt der Wechsel von Autonomie zu Teleoperation dar, insbesondere die Umsetzung der zweiarmigen Manipulation. Die Teleoperation des Unterwasserroboters erfolgt über den Leitstand mithilfe eines am Robotics Innovation Center entwickelten Exoskeletts, das vom Operator getragen wird und Force Feedback, d.h. Kraftrückkopplung, ermöglicht. Zusätzlich betrachten die Bremer Wissenschaftler im Projekt den Informationsfluss zwischen AUV, Leitstand sowie geschäftsinterner Infrastruktur und erarbeiten eine einheitliche Schnittstelle für den bidirektionalen Datenaustausch.
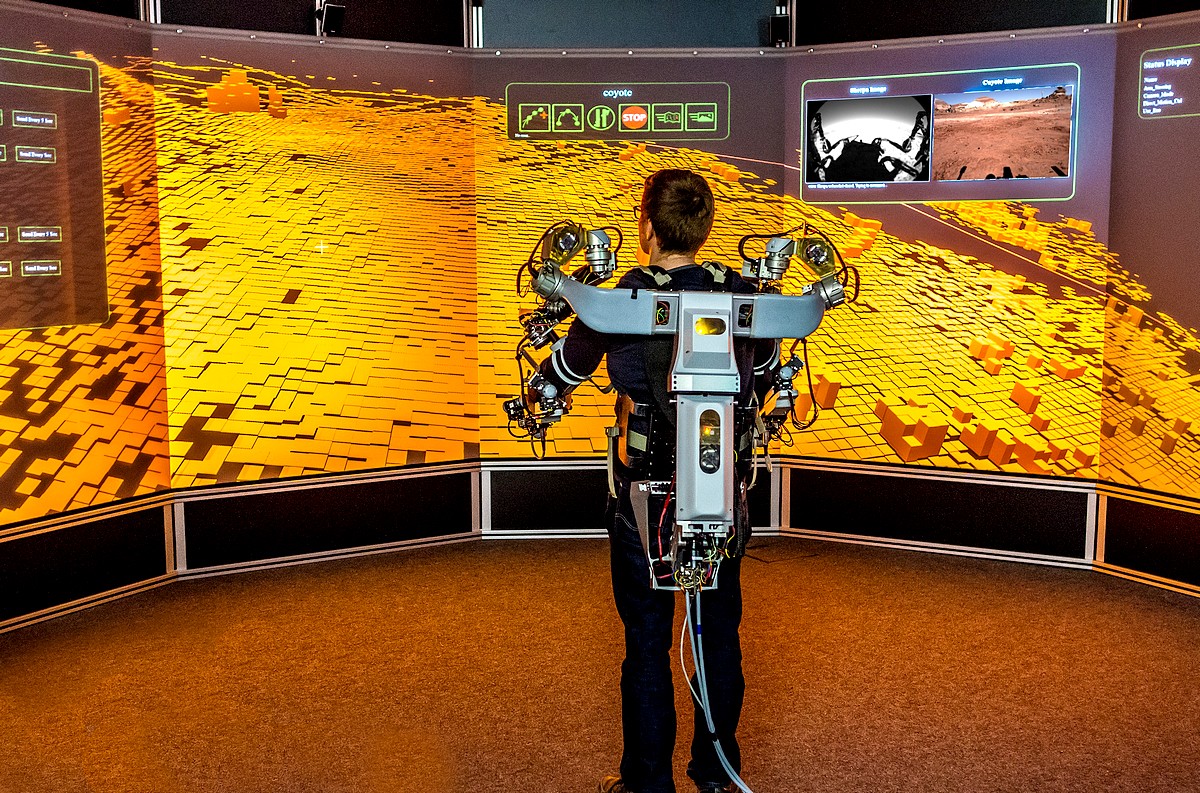
Ein Operator steuert mithilfe eines Oberkörper-Exoskeletts einen Roboter in Utah (USA) von einem virtuellen Leitstand am DFKI in Bremen. ©_DFKI GmbH
DFKI Kognitive Assistenzsysteme:
Virtueller Co-Pilot unterstützt den Operator intuitiv bei der Teleoperation
Im Fokus der Aufgaben des DFKI-Forschungsbereichs Kognitive Assistenzsysteme steht die Entwicklung eines digitalen Assistenten, der den Operator bei seiner Interaktion mit dem Leitstand und letztendlich damit auch bei der durchzuführenden Teleoperation unterstützt. Da bei der Teleoperation mittels Force Feedback beide Arme des Operators genutzt werden, um eine direkte Fernsteuerung der Roboterarme umzusetzen, sollen ergänzende Modalitäten wie Sprache oder Blickgestik zum Zugriff auf Informations- oder Steuerungssysteme eingesetzt werden. Auf diesem Weg ermöglicht es der digitale virtuelle Co-Pilot während der Teleoperation mittels Sprachbefehl Sekundärsysteme des Roboters oder der Infrastruktur zu bedienen, z.B. zum Ein- und Ausschalten der AUV-Scheinwerfer. Das Interaktionsmodell ist dabei dynamisch erweiterbar und ermöglicht die Programmierung kleiner Bewegungsabläufe per Teach-in. Zusätzlich präsentiert der Assistent dem Operator eine Situationszusammenfassung über eine Augmented Reality-Schnittstelle.
DFKI Eingebettete Intelligenz:
Zuverlässige Lokalisierung dank künstlicher oszillierender Magnetfelder
Der DFKI-Forschungsbereich Eingebettete Intelligenz fokussiert sich in Mare-IT auf die Unterstützung der Lokalisierung des Unterwasserroboters mittels künstlicher oszillierender Magnetfelder. Dieses physikalische Konzept wurde bereits in vorherigen Projekten des Forschungsbereichs sowohl im industriellen Kontext als auch in Smart Home-Anwendungen erfolgreich eingesetzt. Im Rahmen von Mare-IT sollen hierbei die Vorteile und Einschränkungen des Systems im Unterwasserbereich erforscht werden.
WITTENSTEIN cyber motor GmbH:
Robuste Thruster-Antriebe mit intelligenter Steuerung für eine effektive und zuverlässige Fortbewegung des AUVs
Im Projekt Mare-IT entwickelt und produziert die WITTENSTEIN cyber motor GmbH die elektrischen Thruster-Antriebe für die Fortbewegung des AUVs. Für den Unterwassereinsatz müssen diese Antriebe besonders robust sein, auch hinsichtlich des Einflusses von Schwebstoffen und Fremdkörpern. Eine intelligente Steuerung und Überwachung der Thruster-Antriebe rundet den Beitrag der WITTENSTEIN cyber motor GmbH ab. Die WITTENSTEIN cyber motor GmbH entwickelt und produziert technologisch hochwertige Servomotoren und Antriebs-Elektroniken sowie komplette mechatronische Antriebssysteme mit höchster Leistungsdichte. Speziell bei Sondermotoren für Ultrahochvakuum, radioaktive Umgebung und den Hochtemperaturbereich besitzt das Unternehmen eine herausragende Expertise. Anwendung finden die Produkte in anspruchsvollen Industrie-Applikationen, in der Luft- und Raumfahrt sowie in der Chemie- oder Lebensmittelbranche, Biotechnologie, Ölexploration oder Medizin- und Pharmatechnik. Die WITTENSTEIN cyber motor GmbH ist einer von insgesamt sechs Geschäftsbereichen des Mechatronik-Unternehmens WITTENSTEIN SE.
SAP SE:
Integration autonomer Roboter in Cloud-Systeme und Predictive Maintenance
SAP untersucht mit Mare-IT in welcher Form und unter welchen Bedingungen autonome Systeme in Cloud-Systeme eingebunden werden können. Ziel ist dabei, die dynamischen Herausforderungen bei der Integration autonomer Systeme in cloud-basierte End-to-End-Prozesse genauer zu verstehen, insbesondere mit Blick auf mobile Roboter, die im Zusammenhang mit Industrie 4.0 stark an Bedeutung gewinnen. Zu solchen Diensten zählt etwa Predictive Maintenance & Service und ihre Verknüpfung zur Erzeugung von Handlungsempfehlungen. Dabei geht es nicht alleine um Schnittstellen, sondern auch um die Frage, wie Anwendungsarchitekturen gestaltet sein müssen, damit Dienste aus der Cloud effizient für Roboter bereitgestellt werden können.
ROSEN Technology and Research Center GmbH:
Messtechnik für zerstörungsfreie Prüfung der Unterwasserstrukturen
Die Inspektion und Integritätsbewertung (bzw. -beurteilung) für die vorausschauende Wartung (Predictive Maintenance) von kritischen technischen Anlagen dient dem Schutz von Mensch und Umwelt. Die ROSEN Gruppe ist global führender Anbieter von Integrity-Lösungen für Großindustrieanlagen der Öl- und Gasindustrie. ROSEN hat in über 37 Jahren ein Technologieportfolio verschiedenster Methoden der zerstörungsfreien Werkstoffprüfung entwickelt, deren Offshore-Anwendung vielversprechend ist. ROSEN verfolgt das Ziel, diese Spitzentechnologien auch in Unterwasserszenarien für sichere und leistungsfähige Anwendungen zum Einsatz zu bringen.
IMPaC OFFSHORE ENGINEERING GmbH:
Ganzheitliche Betrachtung des Anwendungsszenarios
Der Einsatz von AUVs in einer Offshore-Umgebung muss immer ganzheitlich betrachtet werden. IMPaC ist darauf spezialisiert, Gesamtsysteme zu adressieren und wird diese Expertise in das Projekt einbringen. IMPaC wird somit im Projekt Mare-IT den Transport des AUV zum Einsatzhafen, das Ausbringen und Bergen der AUVs vom Einsatzschiff, die Einsatzumweltbedingungen, die Einsatzprofile der AUVs und die einzuhaltenden Regeln und Vorschriften den Markterfordernissen gemäß definieren – z.B. für Öl- und Gasindustrie, Offshore Wind, Rohstoffgewinnung am Seeboden, Kampfmittelerkundung (UXO) – mit den Projektpartnern abstimmen und festlegen.
Ausblick für Mare-IT
Die im Projekt erzielten Innovationen sollen direkt nach Projektende in weitergehende Forschungs- und Entwicklungsaktivitäten übergehen und mittelfristig in einschlägige Bereiche des industriellen Umfelds transferiert werden. Mare-IT wird vom Projektträger Softwaresysteme und Wissenstechnologien des Deutschen Zentrums für Luft- und Raumfahrt e. V. (DLR) mit Mitteln des Bundesministeriums für Bildung und Forschung mit ca. 5,5 Mio. EUR über eine Laufzeit von drei Jahren gefördert.
Weitere Informationen: www.dfki.de/robotik/de/forschung/projekte/mare-it.html
Verwandte Artikel:
– Tiefseebergbau: Seltene Erden aus dem Nordmeer (31. Mai 2017)
– Jade Hochschule entwickelt autonome Unterwasserfahrzeuge (18. Januar 2017)